



















Introduction
Dès l’avènement de l’aviation il y a plus d’une centaine d’année, il s’est rapidement posé la question de la navigation. Contrairement aux moyens de transport terrestres, le ciel, où les aéronefs évoluent, et ses phénomènes météorologiques ne permettent pas nécessairement d’avoir le contact visuel avec le sol et les repères physiques. Il fut évident que naviguer à vue limitait considérablement les possibilités de trouver son chemin et d’arriver à bon port.
Il est naturel que l’aviation ait dans un premiers temps utilisé ce qu’elle avait à disposition, c’est-à-dire les instruments de la marine : compas, boussole, ou encore balise lumineuse pour le vol de nuit. Mais ces techniques archaïques étaient peu adaptées à bord de ses machines à la vitesse de déplacement très élevée et il fallait que l’aviation développe ses propres techniques. Après la Première Guerre Mondiale, l’avènement du transport aérien publique nécessitait de trouver des solutions afin d’assurer le transport de passager et de fret avec un niveau de sécurité et de précision convenable. Voici un bref aperçu de l’histoire du vol aux instruments pour contextualiser notre sujet :
La technique en plein essor de la propagation des ondes, c’est-à-dire la radioélectricité, qui fut d’abord employé pour communiquer, trouvera son application pour naviguer. Celle-ci permettra d’implémenter différents types de balises au sol communiquant avec les instruments de navigation de l’avion.
Pendant l’Entre-Deux-Guerres, apparaîtra d’abord le goniomètre qui permet de détecter un signal radio émis par une antenne et d’être guidé vers celui-ci. C’est la naissance du radiocompas. Celui-là donnera le NDB (Non Directionnal Beacon), la première vraie balise au sol, qui est toujours utilisée de nos jours. Dans la même période, le premier système basique d’aide à l’atterrissage apparait et permet d’être dirigé vers la piste même sans voir celle-ci, c’est l’ILS (Instrument Landing System). Les avions s’équipent en conséquence, l’horizon artificiel se généralise et les premières formations de vol aux instruments sont effectivement établies.
La Seconde Guerre Mondial accéléra considérablement le développement technologique de la navigation aérienne. L’innovation majeure sera le Radar, qui permet à une station au sol de localiser les appareils en vol à tout moment. Ceci préfigurera le contrôle aérien moderne qui utilise encore le radar comme outil principal.
Le LORAN-C fera aussi son apparition et permet de connaitre sa position en mesurant la différence de propagation des ondes entre deux stations. Celui-ci améliora la qualité de la navigation sur les longues distances non couvertes par des NDB. Quand aucun moyen de radionavigation n’était à portée, le seul moyen était de se repérer grâce aux étoiles… L’antique sextant était installé à bord des avions de ligne long-courriers jusque dans les années 1960…
La navigation va considérablement gagné en précision avec l’arrivée des VOR (VHF Omnidirectional Range). Cette balise au sol émet 360 radiales. Le pilote peut ainsi connaitre sa position par rapport à la station à tout moment et la rejoindre ou s’en éloigner avec précision par la radiale désirée. Celles-ci sont fréquemment couplées avec un indicateur DME (Distance Measuring Equipment) qui affiche en permanence la distance de la station au dixième de mile marin près.
Toutes ces magnifiques avancées conservent un inconvénient intrinsèque majeur, elles sont dépendantes de balises au sol. En plus de devoir se trouver à portée, il faut se reposer sur la fiabilité des installations. En somme, la navigation n’est jamais vraiment autonome et dépend des aléas des infrastructures.
L’arrivée du GPS* américain dans les années 1980 (Global Positioning System), balaye le problème de la portée avec les balises car il s’en affranchit totalement et permet de connaitre sa position avec une précision inégalée dans le monde entier. En revanche, il reste dépendant du fonctionnement des satellites et pour cette raison il est en aviation généralement combiné avec d’autres sources de navigation.
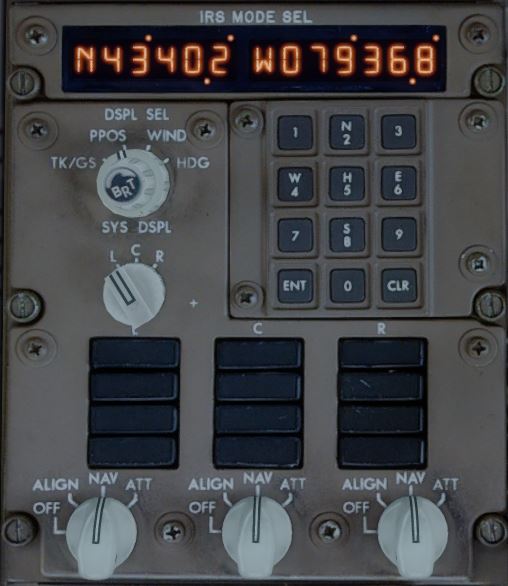
Le premier système vraiment indépendant sera la navigation inertielle. Initié à des fins militaires pendant la Seconde Guerre Mondiale, il équipera les avions de lignes dès les années 1960. Le principe repose sur la détection du mouvement grâce à des accéléromètres permettant d’en calculer la vitesse, le cap, l’attitude et donc la position par rapport au point de départ. Autrefois mécanique, ces plateformes appelées INS (Inertial Navigation System) ou IRS fonctionnent désormais au laser et équipent tous les avions de ligne jusqu’à aujourd’hui. Elles ont l’inconvénient d’être complexes et donc très chers et n’équipent que rarement les petits avions à piston par exemple.
Ces deux derniers systèmes de navigation ont permis le développement de la technique de navigation IFR actuelle, c’est-à-dire le RNAV (Area Navigation).
*L’appellation générique du positionnement par satellite est le GNSS (Global Navigation Satellite System). Sa variante américaine s’appelle donc le GPS et est encore le système dominant dans l’aviation à l’heure actuelle. Les russes ont développé leur propre système appelé GLONASS et l’Union Européenne a mis au point le sien, le Galileo. L’OACI emploi donc le terme de GNSS pour définir ce moyen de navigation, mais nous emploierons ici par convention celui de GPS car il est plus parlant pour l’ensemble d’entre nous.
Qu’est-ce que le RNAV ?
Le Principe
Voyons maintenant ce qui nous intéresse de plus près, c’est-à-dire le RNAV. Comme nous l’avions vu plus haut, le vol aux instruments était basé jusqu’alors sur les stations au sol, appelées communément moyens conventionnels. Le RNAV permet de naviguer vers n’importe quel point sans utiliser les balises au sol. Ces points, qu’ils soient virtuels ou correspondent à des balises réelles sont des points de passage : les Waypoints. Officialisé en 1998, voici la définition officielle du RNAV donnée par l’OACI (Organisation de l’aviation civile internationale) :
“RNAV stands for Area Navigation RNAV: Capability to fly any desired flight path, defined by waypoints such as geographic fixes (LAT/LONG) and not necessarily by ground navaids”.

Les bénéfices de ce système sont multiples :
- Coûts réduits (moins d’infrastructures à entretenir, déplacer ou installer).
- Flexibilité d’adaptation des procédures (pour changer une trajectoire publiée ou des waypoints).
- Précision de la position facilitant la régulation du trafic.
- Economies d’exploitation et gain de temps en volant des trajectoires plus directes.
- Des approches aux instruments autrefois irréalisables avec les moyens conventionnelles (sur un aéroport entouré de relief par exemple).
L’équipement
L’arrivée du GPS et de la navigation inertielle est allée de pair avec une modernisation des systèmes de navigations des avions.
Dans les cockpits, les traditionnels indicateurs de cap, HSI (Horizontal Situation Indicator), ADF Automatic Direction Finder) ou CDI (Course Deviation Indicator) ont désormais disparu des avions commerciaux, ou servent à la rigueur d’instruments de secours (backup) ou secondaires (bien qu’ils subsistent dans des avions plus petits même équipés IFR). Vous les avez forcement déjà vu et ils ressemblaient à ça :







Pour naviguer en RNAV, les avions ont besoin d’équipements modernes adéquats. On peut les diviser en deux catégories.
- Les « petits » avions, considérons ce qui va du petit monomoteur au bimoteur à piston mono pilote. Ceux-ci se contentent généralement d’un GPS qui trouve sa position grâce à l’antenne GPS. On y rentre les waypoints du plan de vol. Le pilote dispose d’une interface affichant entre autres une carte avec la position de l’avion réel en temps réel. Il n’y a donc qu’une source de navigation RNAV, le GPS (l’installation de 2 GPS est possible pour augmenter la redondance).



- Sur les « gros » avions, allant du petit avion d’affaire au gros porteur, le système de navigation est plus perfectionné et en plus de la navigation, il permet une gestion globale des performances de l’avion, comme la consommation, l’altitude et la vitesse : c’est le fameux FMS (Flight Management System). Comme un GPS, il matérialise les informations de navigation sur une carte allant remplacer les instruments conventionnels que nous avons vus plus haut. Précisions que les premiers avions équipés de systèmes de navigation inertiels comme les premiers Boeing 747 gardaient eux une instrumentation classique et n’avaient pas de FMS et ne pouvaient donc pas être encore considérés comme RNAV.
Voici quelques exemples illustrés :


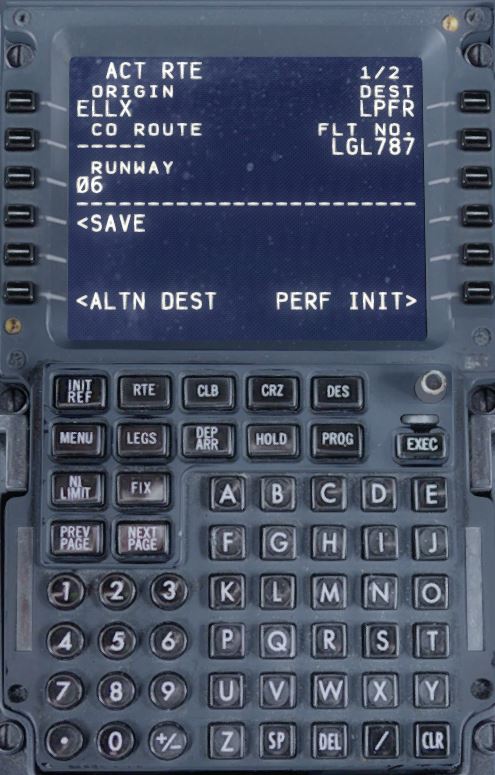




L’autre avantage du FMS est qu’il peut utiliser plusieurs sources de positions différentes et peut se servir de différents capteurs :
- GPS
- VOR/DME
- DME/DME
- INS


Ceci augmente considérablement les performances du système qui sont basés sur des critères que nous verrons plus loin.
Puisque que c’est devenu la norme, votre compagnon qui exécutera la navigation sur la majorité du vol sera le pilote automatique. Les avions certifiés IFR disposent désormais obligatoirement de pilote automatique pouvant au minimum maintenir l’altitude et le cap et majoritairement de suivre une trajectoire désirée provenant des systèmes de navigations. On distingue deux modes :
- Sur le plan horizontal: généralement appelé NAV ou LNAV (Lateral Navigation). Il s’agit simplement de suivre les waypoints entrés dans la route.
- Sur le plan vertical: les plus évolués d’entre eux en sont équipés et est conventionnement appelé VNAV (Vertical Navigation) ou plus rarement PROF (Profile). Il mène automatiquement à respecter les contraintes d’altitude entrées dans la route à un waypoint donnés (lors d’une procédure d’arrivée STARs ou d’une approche RNAV par exemple), en tenant compte des performances de l’avion.
Il existe différentes philosophie en fonction des constructeurs:








Introduction au PBN
Nous ne pourrions pas aller plus loin dans notre exposé sans mentionner le concept de PBN (Performance-based Navigation).
Pour évoluer en RNAV, la navigation doit satisfaire des critères définis de performances, d’équipements, d’infrastructures et de formation des équipages adéquats en fonction de la procédure correspondante. L’évolution des systèmes des avions rendait possible l’implémentation de procédures RNAV toujours plus nombreuses. Cependant, chaque état ou chaque constructeur avait une interprétation assez libre des aspects opérationnels conseillés par l’OACI.
Pour uniformiser les standards et définir plus rigoureusement les critères de performances requis dans l’espace aérien, cette institution a donc décidé d’introduire le PBN en 2004. Celui-ci est officiellement défini dans le document 9613 de l’OACI :
« The PBN concept specifies that aircraft RNAV system performance requirements be defined in terms of the accuracy,integrity, availability, continuity and functionality, which are needed for the proposed operations in the context of a particular airspace concept. »
Le PBN est donc chargé d’instaurer des catégories de performances spécifiées qui sont classées en deux grandes catégories :
- RNAV X* : Définie la performance de la navigation mais l’avion ne dispose pas de fonction d’alerte et de surveillance de celle-ci.
- RNP X* (Required Navigation Performance) : Exige en plus des fonctions d’alerte et de surveillance à bord.
*« X » correspond à la précision de navigation minimum en mile nautique (nm) sur le plan latéral requis pendant 95% du temps.
Ces spécifications sont requises en fonction de la phase de vol :

Les performances des systèmes de navigation sont évaluées par 3 critères :
- Précision de la position : différence entre la position réelle et la position affichée.
- Intégrité : La fiabilité de l’information affichée.
- Continuité : L’absence d’interruption.
Logiquement, plus la phase du vol est critique et demande un degré de précision et de fiabilité élevé pour être exécutée en toute sécurité, plus le système devra être performant. Par exemple, une approche finale vers un aéroport en zone montagneuse demandera une navigation plus précise que le survol d’un océan en altitude de croisière.
Les procédures d’approche (RNP APCH)
En matière de navigation, la phase du vol la plus délicate est par essence l’approche finale. Celle-ci impose de se rapprocher du sol et donc d’obstacles potentiels et de guider l’avion jusqu’à ce petit bout de bitume qu’est la piste d’atterrissage. Il est logique que ce soit elle qui impose les conditions les plus exigeantes. Ces approches nécessitent l’emploi du GPS.
Les premières approches RNAV (appelées aussi GNSS ou RNP selon le cas) avaient été mises en place sur des terrains où il n’y avait pas de moyen d’approche conventionnel disponible. La tendance ces dernières années est à sa généralisation en substitution, voire au détriment des ILS ou des approches VOR ou NDB.
Comme les approches conventionnelles, les approches RNAV sont divisées en deux types :
- Les approches de non précision (NPA).
- Les approches à guidage vertical (APV), mais que l’OACI ne considère pas comme des approches de précision.
Voici donc les différents cas de figure que vous pourrez rencontrer sur vos cartes d’approche :
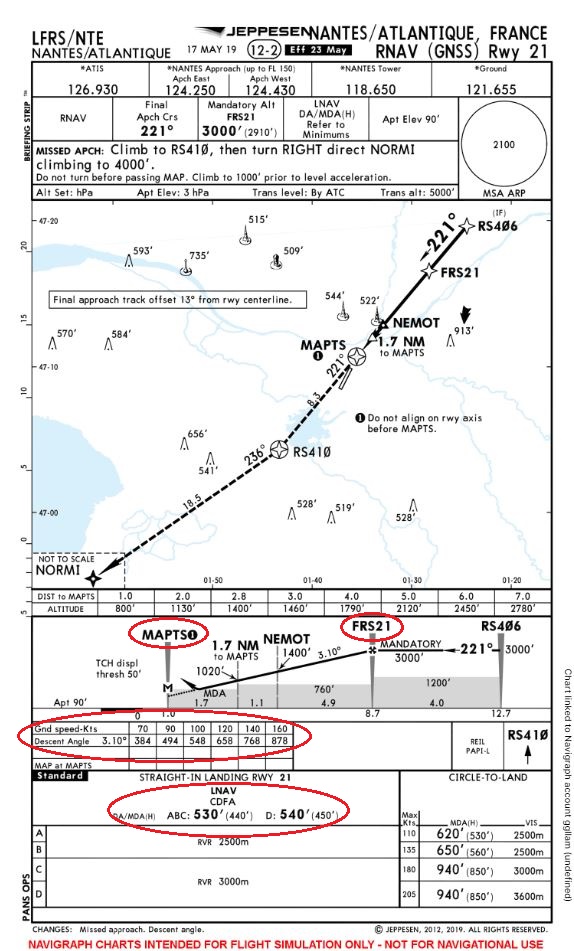
LNAV (NPA)
Comme les autres approches de non précision (VOR, NDB, LOC), elle se vole au mieux selon la technique du CFDA (Continuous Descent Final Approaches). Il n’y a donc pas de guidage vertical. Le guidage horizontal se fait en suivant le cheminement des waypoints sur la carte (Nav Display). On retrouve également un indicateur de déviation horizontale semblable à celui d’un Localizer.
Par conséquent, cette approche est par nature relativement imprécise et impose des minimas assez élevés.
Dans notre exemple, une fois au Final Approach Fix « FR21 » à 3000 ft, il faut adopter un taux de descente permettant de descendre à un angle fixe de 3.10° jusqu’aux minimas de 530 ft ou 540 ft selon le cas. La piste en vue au plus tard en passant le point « MAPTS », on se dirige vers la piste 21 ; dans le cas contraire, on remet les gaz et suit la procédure d’approche manquée publiée. Notons que cette dernière fonctionne également en RNAV.
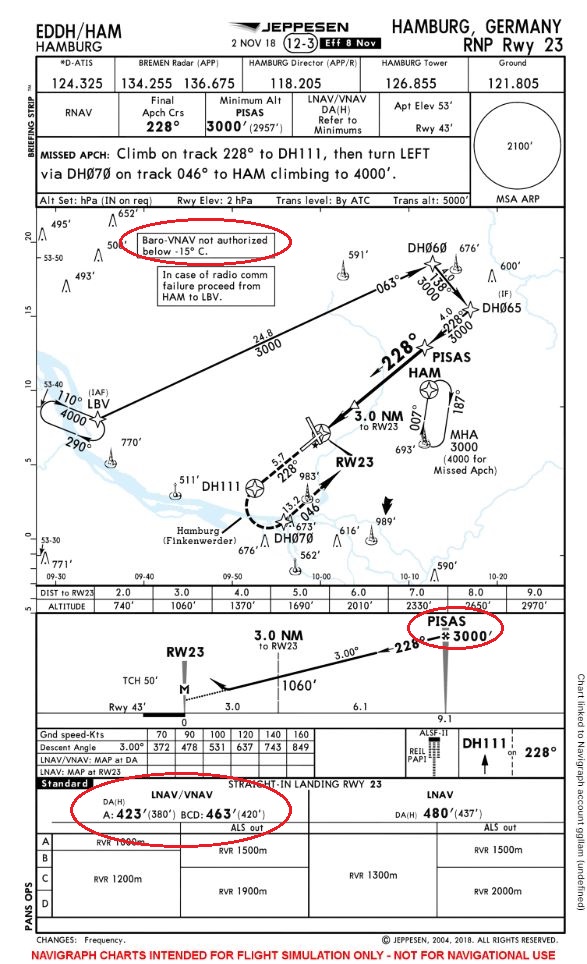
LNAV / VNAV (APV)
Dans ce cas de figure, nous gagnons un guidage vertical. Le système de navigation va afficher devant les yeux du pilote la trajectoire verticale à suivre sous forme d’un « glide path » très similaire, voire identique à celui d’un ILS ; il s’agit de l’indicateur de déviation verticale. Pour calculer cette trajectoire, le système utilise le BARO-VNAV, soit comme source d’altitude celle détectée par l’altimètre de l’avion.


La contrepartie est que cette procédure est sujette aux erreurs altimétriques (mauvais calage, effet de la température, erreurs d’instrument). Plus précis qu’une approche LNAV, elle ne permet pas de descendre aussi bas sans visibilité qu’une véritable approche de précision.
Ici, arrivant au FAF « PISAS » à 3000 ft, le pilote suit l’indicateur de déviation verticale sur son instrument comme il le ferait avec le Glide Path d’un ILS. Il doit avoir conscience que l’exactitude de cette trajectoire dépend du bon fonctionnement de l’altimètre. Remarquons qu’en dessous d’une température ambiante de -15°, il est indiqué que cette approche n’est pas autorisée. En effet, l’erreur de lecture d’altitude serait trop importante pour conduire celle-ci avec une précision verticale acceptable.
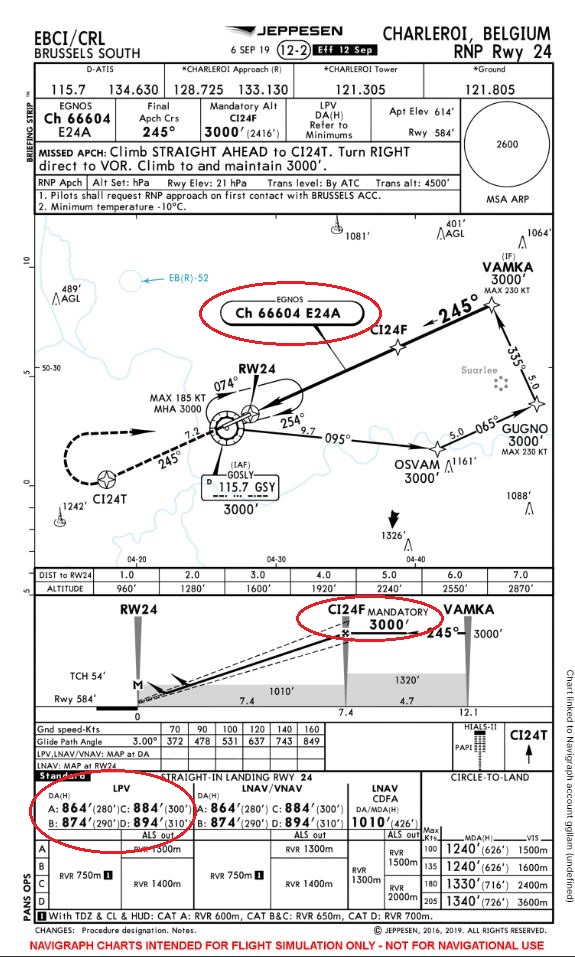
LPV (APV)
LPV signifie Localiser (Performance with Vertical Guidance). Pour résoudre le problème inhérent à l’erreur d’altitude, il fallait donc disposer d’un guidage vertical sans se reposer sur un altimètre. En l’absence de référence externe comme l’est le Glide Slope, la solution fut d’en adopter le principe en utilisant des satellites.
Le récepteur GPS trouve sa position grâce à une constellation de 24 satellites en orbite autour de la terre et détectables dans le monde entier. Pour mettre en place les approches LPV, il est augmenté dans certaines régions du globe de satellites géostationnaires. Ceci va permettre d’atteindre une précision et une redondance permettant de ne s’en remettre qu’au seul GPS pour le guidage vertical. Il s’agit d’un Glide Slope virtuel créé par le GPS que le pilote suit sur son instrument comme il le ferait pour une approche un ILS.

Il s’agit du système SBAS (Satellite-based Augmentation Systems). Voici la liste et les variantes des régions du monde couvertes :
- Amérique du Nord : WAAS
- Europe : EGNOS
- Russie et CIS : SDCM
- Inde : GAGAN
- Japon : MSAS
Sa conduite est alors guerre différente de celle d’une approche LNAV/VNAV, mais les problèmes d’altimétries sont écartés et ce type d’approche permet d’obtenir des minimas quasi-voir-identiques à ceux d’un ILS.
Passant « CI24F », nous descendons aux minimas en suivant la trajectoire d’approche finale affichée. Notons que la fréquence ILS a été remplacée par une fréquence EGNOS. Celle-ci correspond à la procédure en question mais le système la programme automatiquement quand le pilote choisit l’approche.
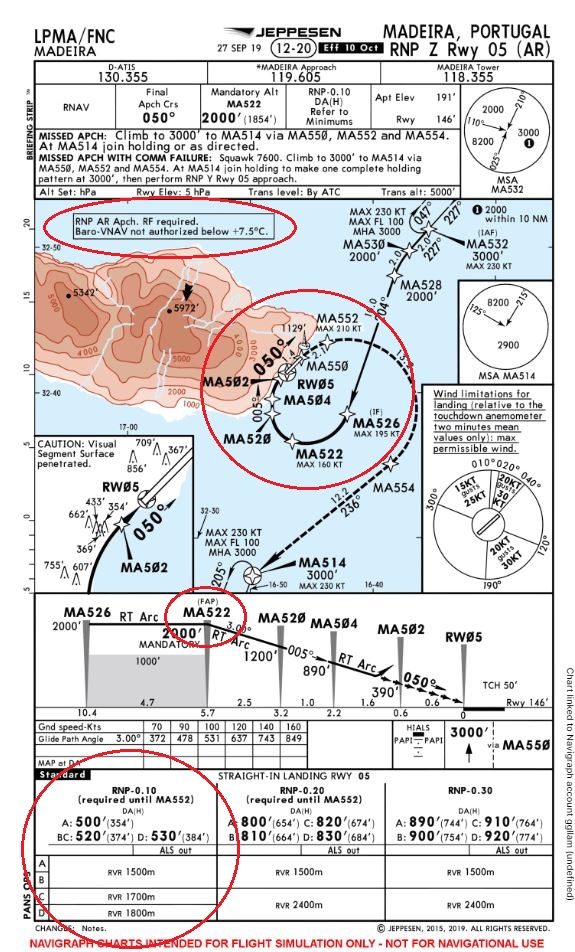
RNAV APCH AR (Authorization Required)
C’est l’approche à la fois la plus exigeante et la plus innovante de toutes les approches RNAV. Certains aéroports sont situés dans des zones montagneuses et les approches pour y accéder sont parsemées de relief, c’est-à-dire d’obstacles potentiellement mortels. Les approches aussi bien conventionnelles que RNAV que nous avons vu précédemment sont constituées de trajectoires rectilignes guidant l’avion jusqu’à la piste. Comment faire quand une montagne se trouve à quelques kilomètres devant la piste, empêchant d’y établir une approche donnant un plan d’approche acceptable ?
En s’affranchissant des moyens conventionnels obligeant à suivre des trajectoires droites, le RNAV ouvre alors une perspective très intéressante. Pourquoi ne pas créer des trajectoires courbées qui éviteraient les obstacles ? Ainsi, des aéroports aux accès opérationnels difficiles qui ne pouvaient compter que sur des approches de non précision aux minimas peu avantageux se finissant par des manœuvres à vue assez délicates, ont mis en place ce nouveau type d’approche. Ainsi, ces pistes deviennent accessibles avec des approches aux instruments aux minimas plus convenables.
Ces approches restent néanmoins assez délicates à exécuter et la fiabilité de la navigation est encore plus cruciale. Une autorisation des autorités aériennes du pays concerné est obligatoire. En effet, les opérateurs sont tenus de faire suivre à leurs équipages une formation adéquate et de les entraîner à opérer sur ce type d’approche particulière. La procédure est comme les autres approches RNAV basée sur le GPS, mais l’avion doit être équipé d’au moins une plateforme INS et de deux récepteurs DME afin d’être approuvé. Certaines procédures peuvent ainsi offrir des niveaux de précision tout à fait remarquables.
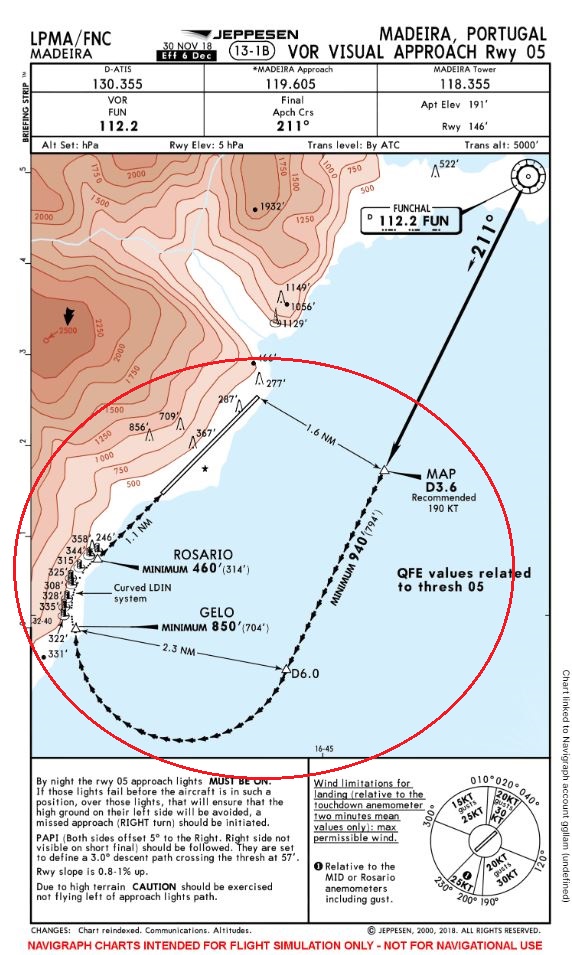
L’aéroport de Madère est un excellent exemple illustrant l’intérêt des approches RNAV APCH AR. Comparons ces deux cas :
La piste 05/23 est construite sur une plateforme à flanc de montagne, rendant impossible toute approche IFR normale en piste 05. Voici la procédure VOR DME qui impose de descendre jusqu’à 3.6 nm au-delà du VOR de Funchal (FUN) jusqu’à des minimas de 940 ft. Si la piste est en vue, il faut alors exécutant une spectaculaire manœuvre à vue en tournant à droite pour se retrouver face à la piste à seulement 1.1 nm de la piste… Il faut de plus disposer de minimum 5000 mètres de visibilité et 800 ft de plafond pour commencer cette approche (!).

La mise en place de la procédure RNP Z (AR) sur cette même piste a remarquablement abaissé les minimas puisque ceux-ci ne sont que de 530 ft d’altitude et 1800 m (CAT D) de visibilité pour une précision de RNP 0.1. Une fois au FAP « MA522 » à 2000 ft, il « suffit » d’enclencher le mode VNAV et de suivre les waypoints indiqués jusqu’aux minimas juste avant le point « MA502 ». Malgré l’environnement hostile, il est possible de descendre relativement près de la piste et aligner avec celle ci sans aucune visibilité, chose impossible avec une approche conventionnelle dans ce cas. Notons cependant qu’il n’est pas permis d’effectuer cette approche en dessous d’une température extérieure de 7.5°C. En effet, les approches RNAV APCH AR fonctionnent sur le principe du BARO-VNAV.

Voilà est brossé le principe du RNAV dans ce résumé. Pour creuser ce sujet, voici un peu de lecture venant de sources officielles traitant du RNAV et ses applications:
-Le Doc 9613 de l’OACI régissant le PBN.
-Les différentes approches RNAV détaillées dans cette formation de la DGAC française
-Les approches RNP APCH AR selon l’OACI avec un petit cours pour appronfondir.
-Le SBAS expliqué par l’EASA, l’agence européenne.

























Merci pour ces éclaircissements qui m’ont permis d’approfondir mes connaissances sur ces systèmes que j’utilise dans P3D, sans forcément savoir comment ils fonctionnent réellement.
Un grand merci pour ce superbe article qui donne une vision complète des différentes techniques de navigation. J’aurais aimé le lire plus tôt !
excellent !
merci, pour toutes ces informations précises.
Excellent article, clair et exhaustif.
Un grand merci à son auteur.
Un vieux pilote
merci pour ses éclaircissements , j’ai besoin de plus d’informations et documentations conçernant ce domaine RNAV(GNSS) procédure d’approche ,je travaille actuellement sur la thématique (Thése de Master GNSS) : »Airoport spray,rain and dust clouds constraints precise flight trajectory reconstruction using RNAV (GNSS) approach procedures »
voici mon mail : ennaciri.etudiante2@gmail.com
si vous pouvez m’aidez, n’hésitez pas a me contacter sur mail pour plus d’éclaircissement.
Je vous remercie d’avance